SimulationDynamics¶
-
class
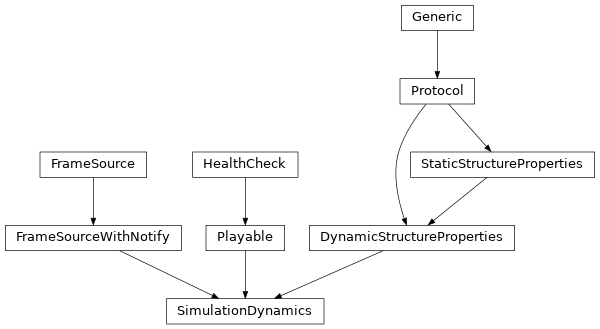
narupatools.core.dynamics.SimulationDynamics(*, playback_interval: float)¶ Base class for an implementation of dynamics driven by Narupa.
This implements all the common commands for controlling a simulation, as well as running the simulation in both blocking and non-blocking modes. Subclasses of this only have to override _step_internal and _reset_internal to implement stepping forward a single step in the simulation and reseting the entire simulation back to its initial state.
Inheritance
Methods
Create a SimulationDynamics object.
Check if a task has thrown an exception, and reraise it if so.
Attempt to convert an arbitrary object to simulation dynamics.
Get the current state of the system as a Narupa FrameData.
Check background tasks to ensure they have not encountered an exception.
Pause this object if it is running.
Play the given object.
Reset the simulation.
Reset the timer such that the elapsed time and steps is zero.
Restart this back to its initial state.
Run the dynamics.
An alias for run().
Step forward by one step, and then pause the simulation.
Stop the object if it is running.
-
__init__(*, playback_interval: float)¶ Create a SimulationDynamics object.
Should be called by subclasses, and not called directly.
- Parameters
playback_interval – Interval at which dynamics will be run, in seconds.
-
classmethod
check_task(task: Optional[concurrent.futures._base.Future]) → None¶ Check if a task has thrown an exception, and reraise it if so.
- Parameters
task – Background task to check for an exception.
-
static
create_from_object(obj: Any) → Optional[narupatools.core.dynamics.SimulationDynamics]¶ Attempt to convert an arbitrary object to simulation dynamics.
-
get_frame(fields: infinite_sets.infinite_sets.InfiniteSet[str] = everything(), existing: Optional[narupatools.frame._patch.FrameData] = None) → narupatools.frame._patch.FrameData¶ Get the current state of the system as a Narupa FrameData.
- Parameters
fields – Collection of keys to include in the FrameData
- Returns
Narupa FrameData populated with requested fields.
-
health_check() → None¶ Check background tasks to ensure they have not encountered an exception.
Calling this allows exceptions raised on background threads to be thrown on the main thread. It is a useful tool for checking if an object has crashed silently in the background.
It is recommended to call this periodically from the main thread to ensure an object is healthy. If no exceptions have occurred, this method will do nothing.
-
pause(*, wait: bool = True) → None¶ Pause this object if it is running.
This will not cancel the current run if present, merely suspend it until a subsequent call to play() is made.
- Parameters
wait – Wait until the pause has actually occurred.
-
play() → None¶ Play the given object.
If this is not running, run this on a background thread. Else, unpause if this is paused.
-
reset() → None¶ Reset the simulation.
The behaviour of this depends on the implementation of the dynamics, but commonly an implementation of SimulationDynamics should record the initial state of the simulation on initialization, and use this to reset the simulation.
This method is called whenever a client runs the reset command, described in
frame_server.
-
run(steps: Optional[int] = None, *, block: Optional[bool] = None) → Union[bool, concurrent.futures._base.Future[bool]]¶ Run the dynamics.
- Raises
ValueError – The number of steps was negative or 0.
- Parameters
steps – The number of steps to run for, or None to run indefinitely. If provided, must be larger than 0.
block – Should this be run in this thread (block=True) or in a background thread (block=False)
- Returns
If run in blocking mode, returns True if the dynamics completed and False if it was interrupted. If not run in blocking mode, returns a Future with the same result.
-
stop(*, wait: bool = True) → None¶ Stop the object if it is running.
If this is running, this object will stop executing at the next available point.
- Parameters
wait – Should this call wait until this object has stopped running before returning?
Attributes
Angular momentum of each particle abouts its center of mass.
Angular velocity of each particle abouts its center of mass.
Set of fields which are marked as having changed after a dynamics step.
Elapsed number of steps of the simulation since initialization/last reset.
Elapsed time of the simulation since initialization/last reset in picoseconds.
Forces on particles in kilojoules per mole per nanometer.
Is this currently running but paused?
Is this currently playing and not paused?
Is this currently running?
Kinetic energy in kilojoules per mole.
Masses of particles in daltons.
Momenta of particles in dalton nanometers per picosecond.
Moments of inertia for each particle abouts its origin in its local frame.
Event triggered after each step of the dynamics is run.
Event triggered before each step of the dynamics is run.
Event triggered when dynamics is reset.
Orientations of each atom as unit quaternions.
Time in seconds between individual steps of this playable.
Number of steps this playable goes through in 1 second.
Positions of particles in nanometers.
Potential energy in kilojoules per mole.
Current temperature of the dynamics in Kelvin.
Current time step of the simulation in picoseconds.
Torques on each particle abouts its center of mass.
Total number of steps of the simulation.
Total time of the simulation in picoseconds.
Velocities of particles in nanometers per picosecond.
-
angular_momenta¶ Angular momentum of each particle abouts its center of mass.
- Raises
AttributeError – Angular momenta is not defined for this system.
- Returns
Array of angular momenta in dalton nanometer squared per picosecond.
-
angular_velocities¶ Angular velocity of each particle abouts its center of mass.
- Returns
Array of angular velocities in radians per picoseconds.
-
dynamic_fields= frozenset({'energy.kinetic', 'energy.potential', 'particle.forces', 'particle.positions', 'particle.velocities', 'simulation.elapsed_steps', 'simulation.elapsed_time', 'simulation.total_steps', 'simulation.total_time'})¶ Set of fields which are marked as having changed after a dynamics step.
-
elapsed_steps¶ Elapsed number of steps of the simulation since initialization/last reset.
When the system is reset, this value is reset to 0.
-
elapsed_time¶ Elapsed time of the simulation since initialization/last reset in picoseconds.
When the system is reset, this value is reset to 0.
-
forces¶ Forces on particles in kilojoules per mole per nanometer.
-
is_paused¶ Is this currently running but paused?
-
is_playing¶ Is this currently playing and not paused?
-
is_running¶ Is this currently running?
This is True even if the playback is paused.
-
kinetic_energy¶ Kinetic energy in kilojoules per mole.
-
masses¶ Masses of particles in daltons.
-
momenta¶ Momenta of particles in dalton nanometers per picosecond.
-
moments_of_inertia¶ Moments of inertia for each particle abouts its origin in its local frame.
- Returns
Array of moments of inertia, either scalars (for symmetric shapes) or 3-vectors.
-
on_fields_changed¶
-
on_post_step¶ Event triggered after each step of the dynamics is run.
-
on_pre_step¶ Event triggered before each step of the dynamics is run.
-
on_reset¶ Event triggered when dynamics is reset.
This can be used when the behaviour of reset that the current dynamics performs is insufficient, or the user would like to perform a more detailed reset such as reinitializing velocities.
-
orientations¶ Orientations of each atom as unit quaternions.
-
playback_interval¶ Time in seconds between individual steps of this playable.
-
playback_rate¶ Number of steps this playable goes through in 1 second.
-
positions¶ Positions of particles in nanometers.
-
potential_energy¶ Potential energy in kilojoules per mole.
-
temperature¶ Current temperature of the dynamics in Kelvin.
- Raises
AttributeError – Temperature is not defined for this dynamics.
-
timestep¶ Current time step of the simulation in picoseconds.
- Raises
AttributeError – Cannot get the current time step for this dynamics.
-
torques¶ Torques on each particle abouts its center of mass.
- Returns
Array of torques in kilojoules per mole.
-
total_steps¶ Total number of steps of the simulation.
This includes all times the simulation has been reset.
-
total_time¶ Total time of the simulation in picoseconds.
This includes all times the simulation has been reset.
-
velocities¶ Velocities of particles in nanometers per picosecond.
-